Pósters: Facultad de Ingeniería en Mecánica y Ciencias de la Producción

Ingeniería en Mecatrónica
Diseño de un sistema robótico heterogéneo para la coordinación entre un robot terrestre y aéreo.
Steep Bryan Martinez Santana, Daniela Nicole Cueva Jimenez
ODS asociados:
Ingeniería en Mecatrónica
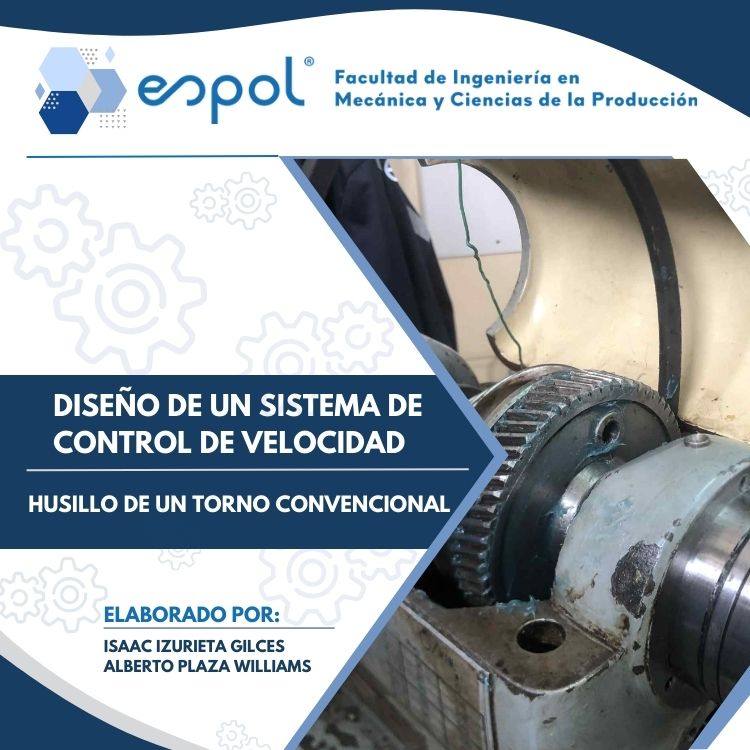
Diseño del sistema de control de variación de velocidad del husillo de un torno convencional.
Alberto Joel Plaza Williams, Josue Isaac Izurieta Gilces
ODS asociados:

Ingeniería en Mecatrónica
Diseño e incorporación de un sistema de manipulación para el robot QUPA orientado a tareas de construcción colaborativa
Jose Miguel Santos Teran, David Alejandro Torres Torres
ODS asociados:
Ingeniería en Mecatrónica
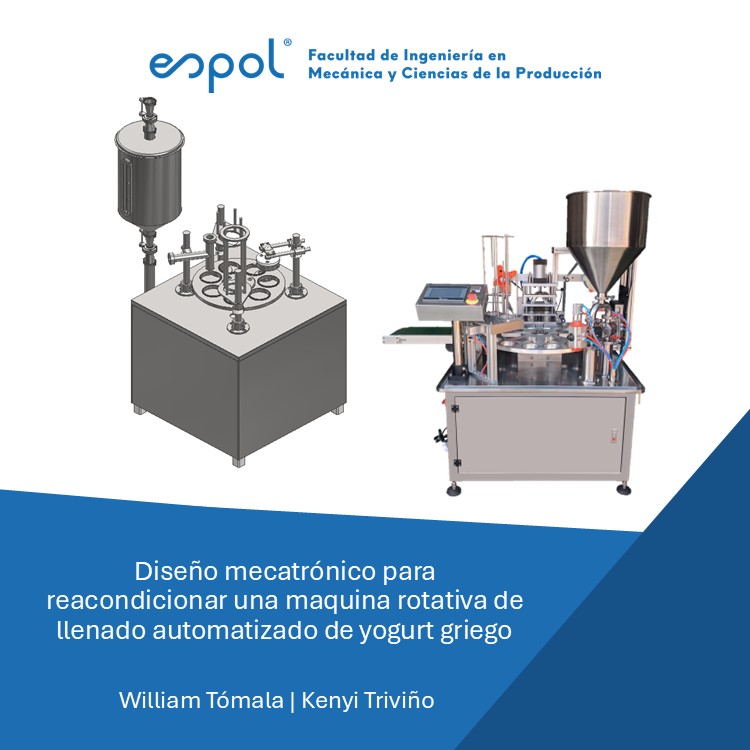
Diseño mecatrónico para reacondicionar una máquina rotativa de llenado automatizado de yogurt griego
William Andrew TomalÁ Zapata, Kenyi Jair TriviÑo Cazorla
ODS asociados:

Ingeniería en Mecatrónica
Diseño Mecatrónico y Análisis Dinámico de una Cama Abatible Vertical con Automatización del Movimiento
Diego De Jesus Alban CedeÑo, Rafael David Mata Puente
ODS asociados:
Ingeniería en Mecatrónica
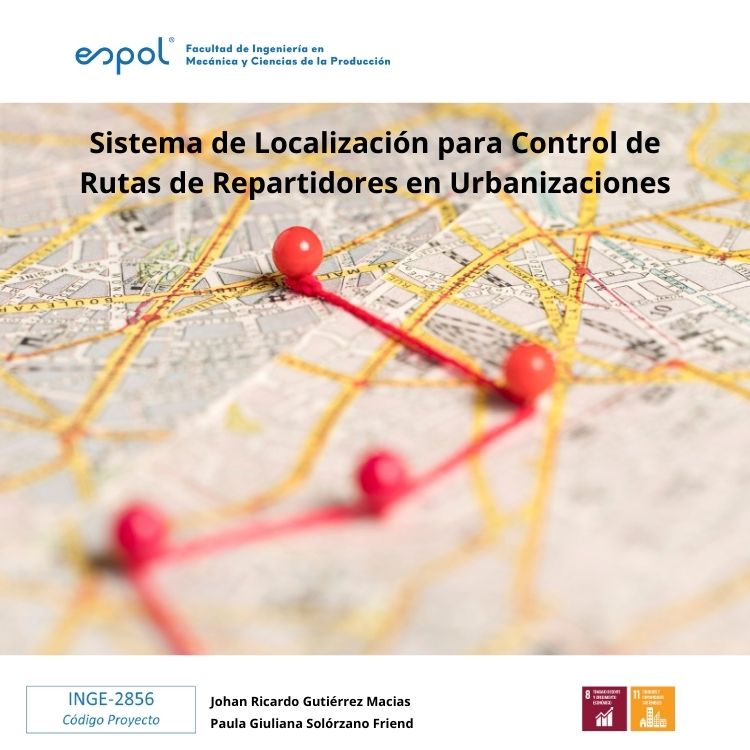
Diseño y prototipo de localizador electrónico con geolocalización para controlar rutas de delivery en urbanizaciones
Johan Ricardo Gutierrez Macias, Paula Giuliana Solorzano Friend
ODS asociados:

Ingeniería en Mecatrónica
Diseño y validación de una mano antropomórfica para implementación en robot de servicio
Ramses Ian Garcia Galarza, Mario Amado Moran Mazzini
ODS asociados:

Ingeniería en Mecatrónica
Entorno en realidad virtual de entrenamiento médico inmersivo con seguimiento de manos y respuesta háptica
Johnny Daniel Mejia Parra
ODS asociados:

Ingeniería en Mecatrónica
Implementación de una Prótesis de Mano Mecatrónica Utilizando Diseño Personalizado y Control Inteligente
Jair Eduardo Alvarado Ramos, Maria Emilia Montoya Vera
ODS asociados:

Ingeniería en Mecatrónica
Navegación autónoma de un UGV para la detección de Cacaos Enfermos y Sanos
Jefferson Alfredo Ramirez Avila, Joshua Alexander Cobos Valle
ODS asociados: